Detection Class: Vegetation
Overview
Model BSHRK-W-VGD-21 is trained to detect vegetation coverage. BSHRK-W-VGD-21 is capable of detecting vegetation coverage from aerial image input and producing a high-quality probability heatmap of vegetation coverage.
| Imagery | Inference |
|---|---|
 |
 |
| Input imagery by Airbus - UP42 - Airbus Pléiades |
Input and Expected Output
Input
Input data should be a single aerial or satellite image in GeoTIFF or COG file format. Orca containers are trained for detection on orthophoto images with a resolution of 40-60cm and input images should comply with this standard. Detection requires traditional RGB optical channels. For more information on input requirements:
Output
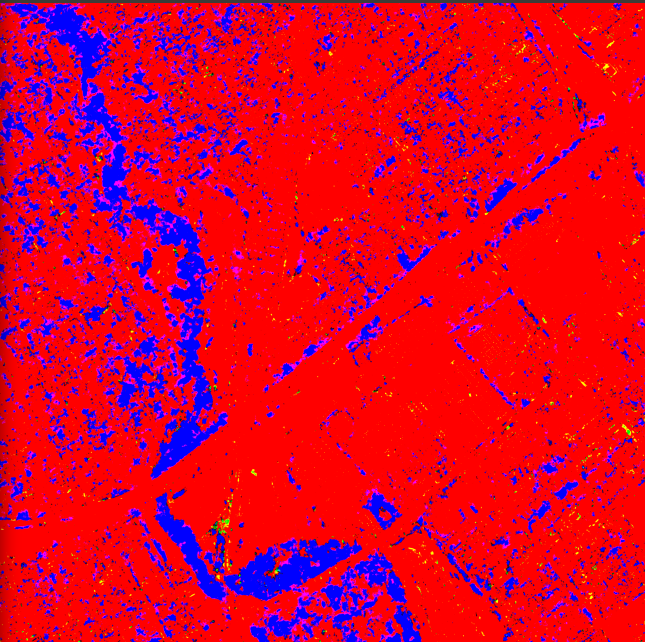
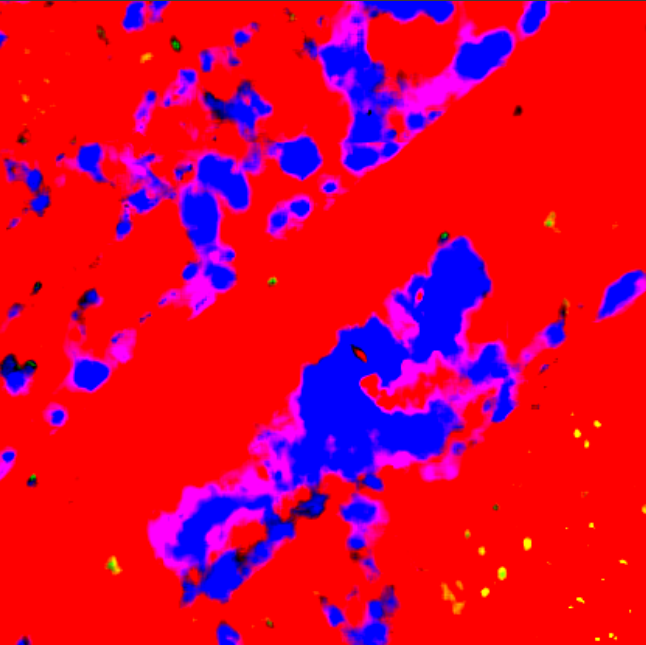
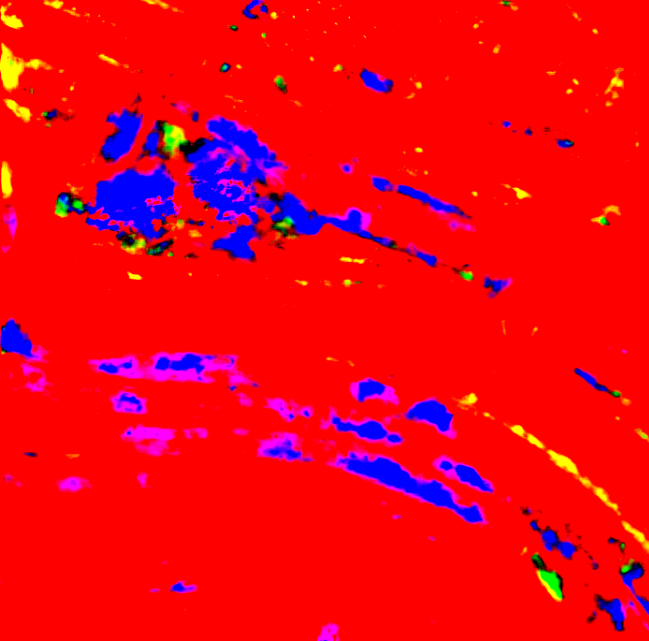
When the above input specifications are met, BSHRK-W-VGD-21 will produce an image mask as a GeoTIFF file with a resolution matching that of the input imagery.
The results are provided in 3 channels each with 0-255 value heatmap. The three channels represent: low/no vegetation coverage, medium-height vegetation, and high vegetation.
For output troubleshooting and limitations, see Known Issues and Limitations below.
Known Issues and Limitations
Training
Orca will perform well with imagery in areas with characteristics similar to the images used to train the machine learning algorithms. Unfortunately, it is not possible to tell how performance is impacted with images from other image providers or regions with dissimilar vegetation/color/building characteristics, etc.
Imagery
If the input is only provided as a three-channel RGB image, it is possible that green surfaces will return a false positive. However, when the input is provided as a four-channel image including near infrared, the occurrence of a false positive is greatly reduced.
The angle of the image is also important if the desired results include exact coordinates for specific vegetation. In this case ortho projections should be used. Otherwise, when mere detection of vegetation is desired, images taken from other angles should be adequate.
| Imagery | Inference |
|---|---|
 |
 |
| Input imagery by Airbus - UP42 - Airbus Pléiades |
| Imagery | Inference |
|---|---|
 |
 |
| Input imagery by Airbus - UP42 - Airbus Pléiades |
Processes
If Orca is not properly configured, the vectorization process will be run on the results from BSHRK-W-VGD-21. This will result in the following error message:
runVectorization Error
When the vecotrization process is run with a detection class container that does not support the process( currently BSHRK-W-VGD-21), it will result in the following error message:
Traceback (most recent call last):
File "/srv/scripts/all_in_one_pipeline.py", line 160, in <module>
main()
File "/srv/scripts/all_in_one_pipeline.py", line 146, in main
raise ValueError(f"Vectorization is not supported for inference type {inference_type}. "
ValueError: Vectorization is not supported for inference type InferenceType.VEGETATION_DETECTION
To change the configuration see Orca Configuration.